
Robotizovaná depaletizace a navěšování hliníkových kol

Spolehlivé třídění
a navěšování hliníkových kol před lakováním
Základní parametry
Prvotní depaletizace
Uchopení trojice kol
Přemístění kol na závěsný dopravníkový systém lakovny
Základní charakteristika
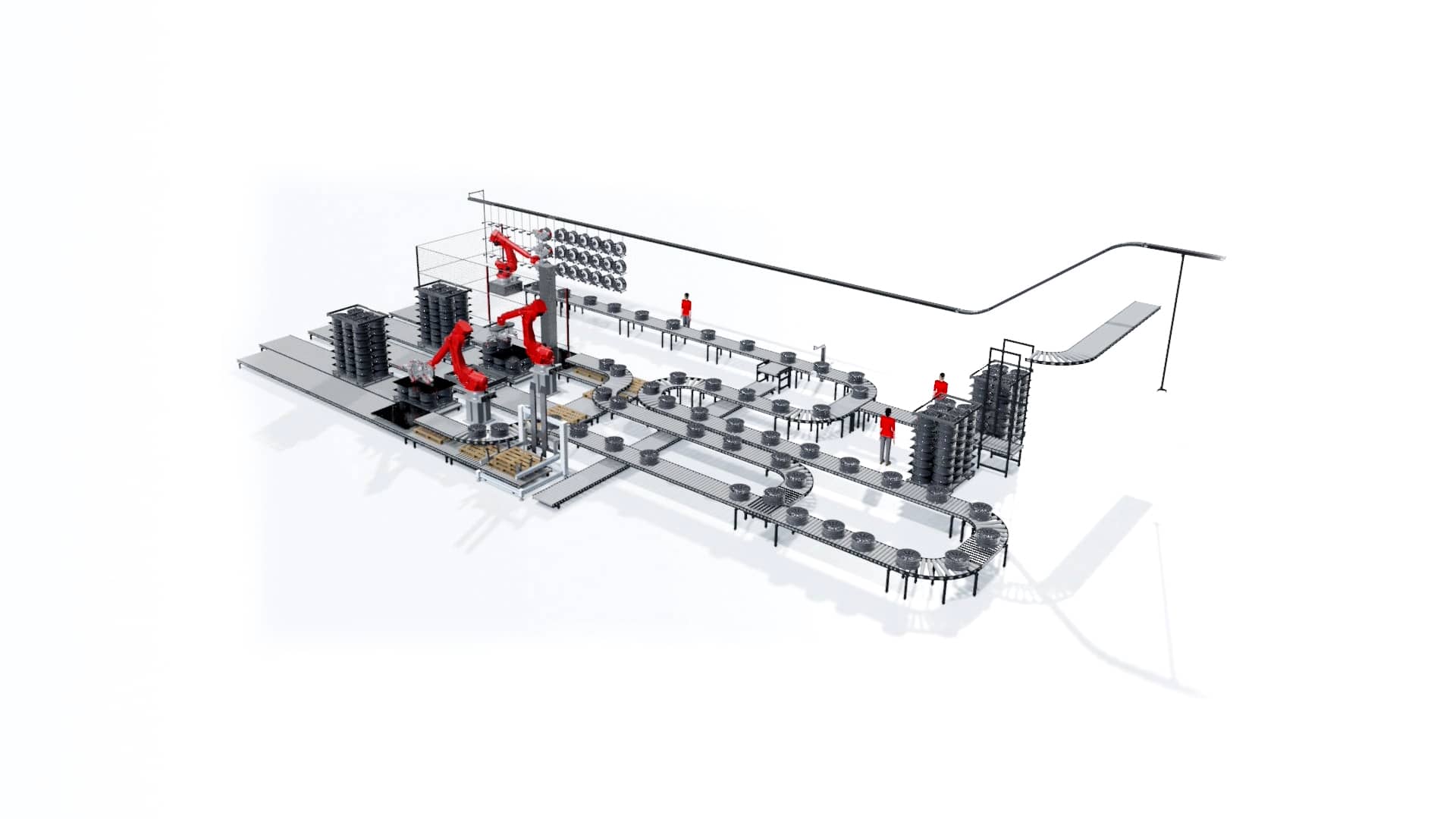
Koncept zahrnuje linku pro robotizovanou depaletizaci hliníkových kol z EWPS palet, kde tato kola jsou dopravníkovým systémem dopravena k robotu navěšování, který je umístí na stávající závěsný dopravníkový systém lakovny. Takto zavěšená kola jsou připravena k lakování.
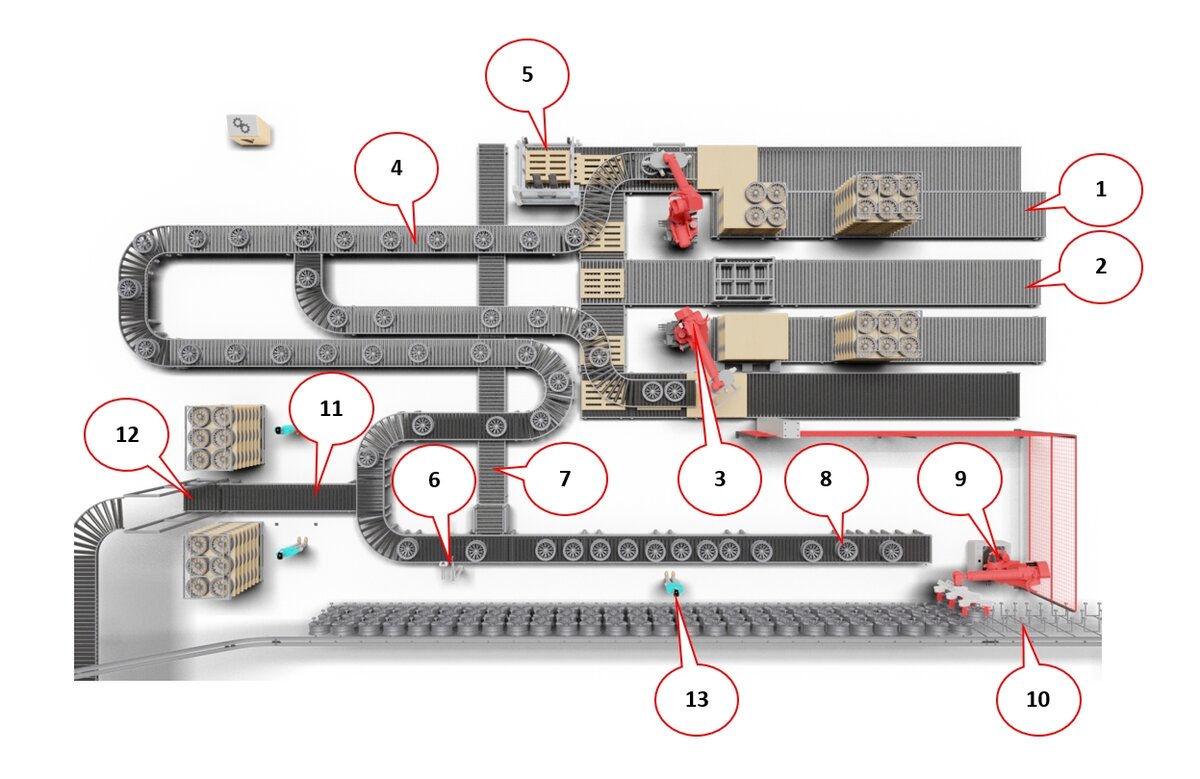
Popis pracoviště:
1 – Dopravníkový systém pro dopravu skladovaných kol určených k depaletizaci, 2 – Dopravníkový systém pro dopravu EWPS palet, 3 – Roboti určení pro depaletizaci hliníkových kol, manipulaci s proklady a EWPS paletami, 4 – Dopravníkový systém určený pro dopravu depaletizovaných kol, 5 – Zásobník palet, 6 – Kamerový systém pro kontrolu typu kola před navěšováním, 7 – Dopravníkový systém pro nesprávná nebo nerozpoznána kola, 8 – Odběrné centrovací místo pro robota navěšování, 9 – Robot navěšování, 10 – Závěsný dopravníkový systém lakovny, 11 – Dopravníkový systém pro manuální depaletizaci, 12 – Dopravníkový systém pro napojení WIP (automatický sklad), 13 – Pracoviště ručního navěšování.
Popis automatizovaného procesu
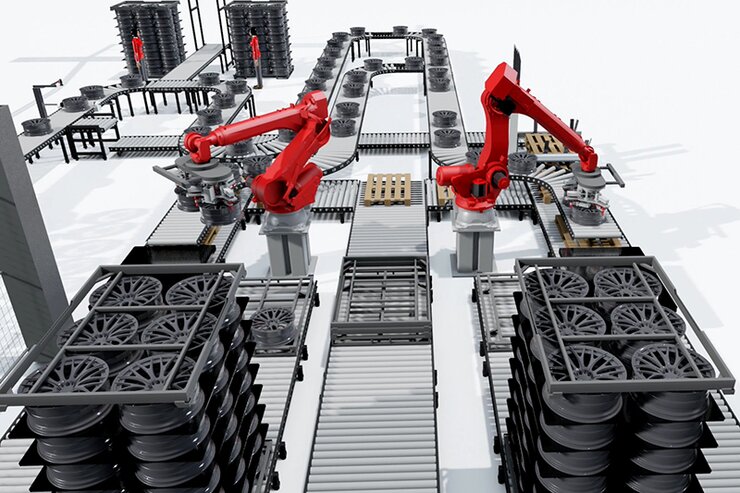
► Kola z palet jsou postupně odebírána z dopravníkového systému dvěma roboty a jsou ukládána v řadě za sebou na dva samostatné dopravníky.
► Plastové proložky mezi koly a kovové EWPS palety navrchu a naspodu jsou tříděny a ukládány na jiné samostatné dopravníky.
► Depaletizační roboti jsou mezi sebou navzájem zkoordinováni, nicméně v případě poruchy jednoho robota je druhý robot schopen pracovat samostatně.
► Oba dopravníky s koly se následně sbíhají v jeden dopravník, přičemž na tento dopravník se můžou napojit také kola z automatického skladu.
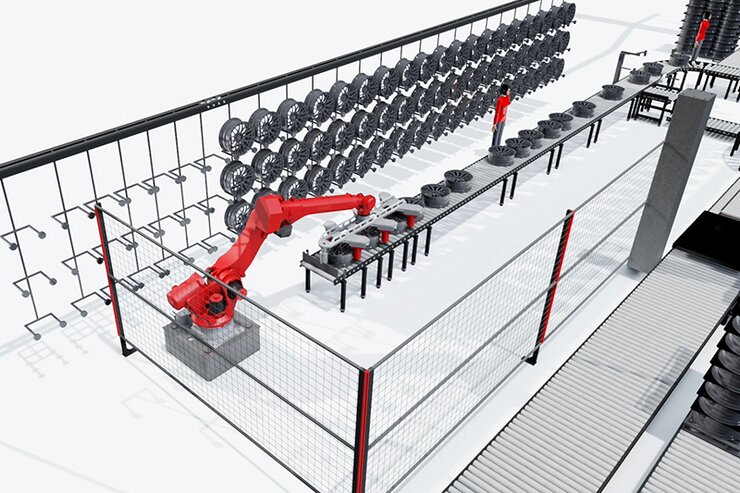
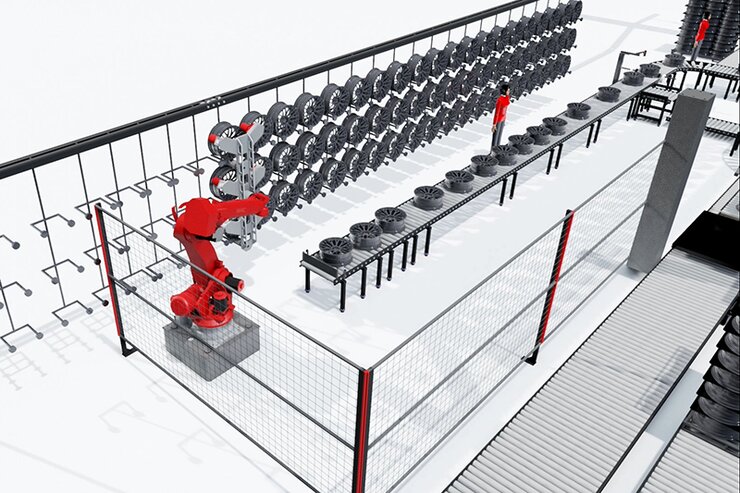
► Kamerový systém pro kontrolu typu, designu a velikosti kola rozpozná nesprávné kusy – tyto kusy jsou pak poslány zvlášť na NOK dopravník.
► Na konci dopravníku odebírá navěšovací robot kola po třech a ukládá je na závěsný dopravníkový systém lakovny. K tomu využívá speciální gripper pro manipulaci s třemi koly. Navěšovací robot pracuje nezávisle na automatické depaletizaci.
► V případě poruchy jakéhokoliv robota jsou připravena pracoviště pro manuální práci s koly, ať už ruční depaletizaci či zavěšování kol.
► Veškerá automatizovaná manipulace s koly probíhá bez jejich poškození, pracoviště s ruční manipulací obsahuje ochranné prvky proti poškození kol.
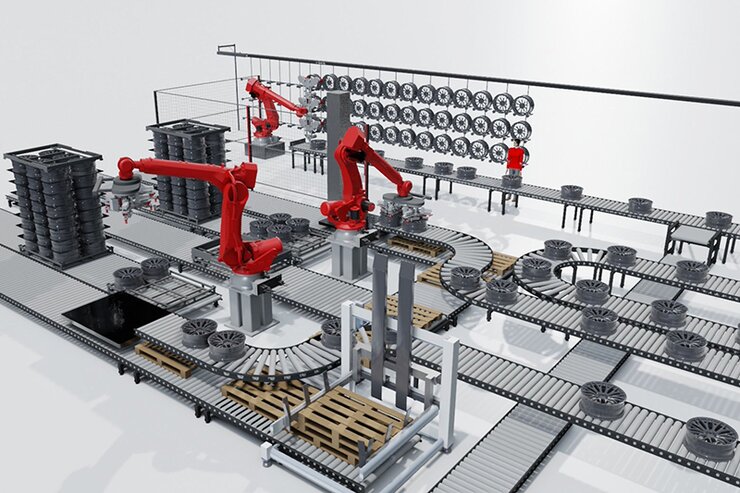
VIZUALIZACE – ROBOTIZOVANÁ DEPALETIZACE A NAVĚŠOVÁNÍ HLINÍKOVÝCH KOL


